AdvantageScope
AdvantageScope (AdScope) is an advanced telemetry and log viewing tool developed by FRC Team 63282. They have excellent documentation available here. This page should act only as a quick reference for common actions and you should check their official documentation for more in depth instructions. The documentation is also available offline in the application.
Log Files as Source
AdScope can also interpret .wpilog, .hoot, and .dslog log files that are recorded on the robot during testing/matches. You can open any of these log files from the clicking File > Open Log(s)... within the menu bar. This will launch a file selection for you to pick a log to load. You can also download the logs from the robot remotely using File > Download Logs..., but you need to make sure your settings are configured to connect to the robot.
See Managing Log Files for more.
Live Code as Source
AdScope is intended for development testing only. It is a bulky application and should not be used during competition. Any topics published to NetworkTables should be available as live telemetry. You will need to ensure the roboRIO address is set correctly in Help > Show Preferences.... That settings should stay once set.
To start the connect to the robot or simulation you can click the following:
- Robot:
File>Connect to Robot - Simulator
File>Connect to Simulator
See Connecting to Live Sources for more.
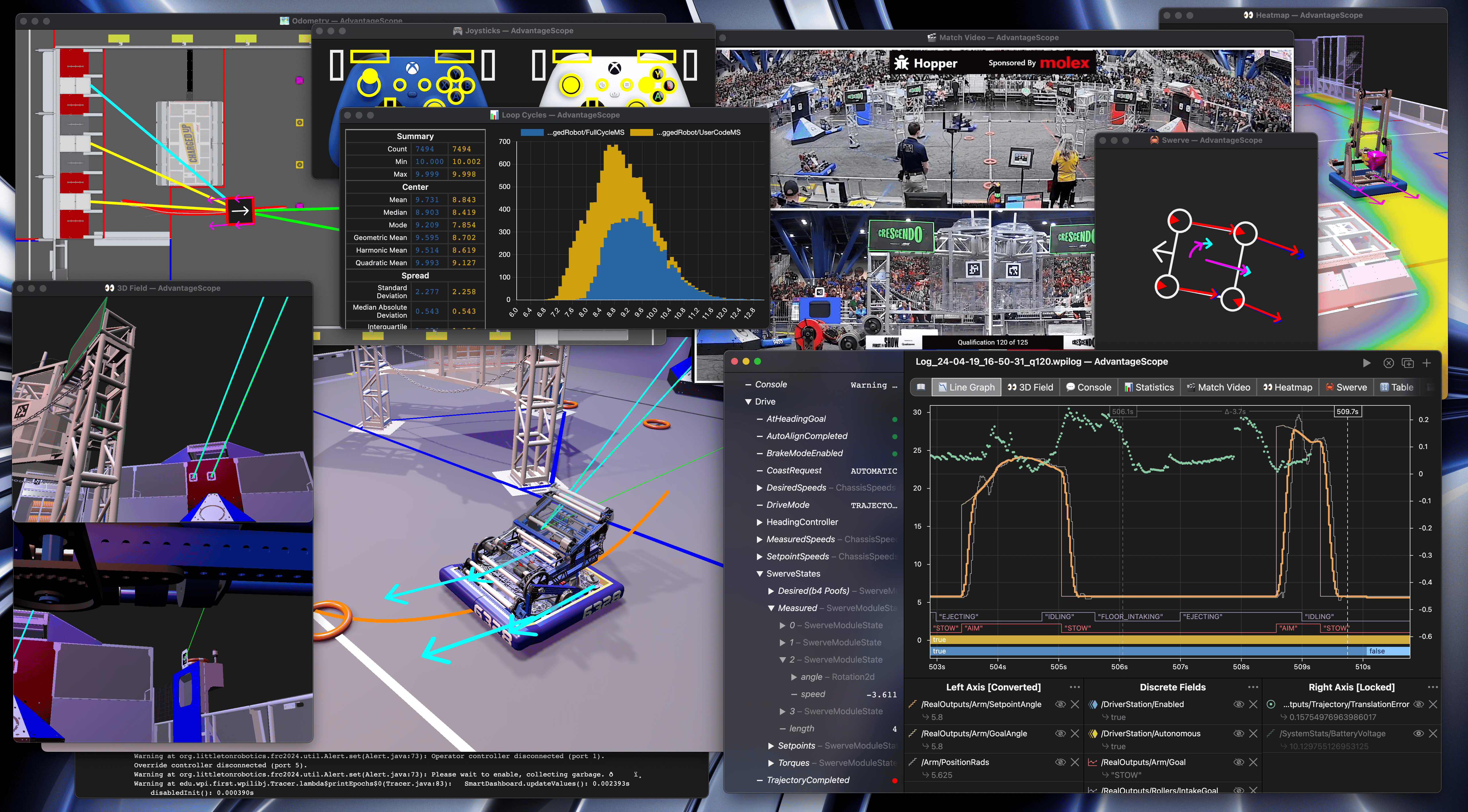
Tabs
There are a bunch of different tabs that you can select from to display different types of data. I am too lazy to list them all out so feel free to check out Tab Reference in the AdScope docs. Some of the most helpful tabs are:
Throughout the season we try to keep an updated template for different AdScope usages. This can include a tuning template, a match review template, and even a showcase template.
You can load or save to these templates with File > Import Layout... and File > Export Layout respectively.
Custom Assets
You can also setup custom assets to fully visualize our robot in AdScope. This is very helpful for simulation and math replay because it can give you an idea of what the robot was doing without have to look at a bunch of states. However it is not easy and it will take a little bit of time to setup. Its recommended to use our 2025 robot project as reference when setting it up. You can also reference the official AdScope doc for Custom Assets and 3D Components.
If you just need the rough geometry for your robot I would recommend attempting to implement a WPILib Mechanism. This is much simpler and faster approach.